MCP: A Control-Theoretic Orchestration Framework for Synergistic Efficiency and Interpretability in Multimodal Large Language Models
A Abstract
Aiming at the problems of computational inefficiency and insufficient interpretability faced by large models in complex tasks such as multi-round reasoning and multi-modal collaboration, this study proposes a three-layer collaboration framework based on model-controller-task adaptation (MCP). By decoupling large model functions into reasoning, generation and retrieval modules, and combining reinforcement learning-driven dynamic routing algorithms and task adaptation mechanisms, the systematic integration of control theory and large model dynamic reasoning is achieved for the first time. Experiments show that the MCP framework improves the performance of cross-modal benchmarking tasks by 15-30% compared with the baseline model, improves the reasoning efficiency by 40%, and generates the interpretable intermediate results through the Presenter layer, obtaining 90% of the manual interpretability scores, which provides a brand-new technological path to solve the bottleneck of the practical application of the large model.
1 Introduction
The unidirectional reasoning model of large models (e.g., GPT-4, LLaMA) exposes significant defects in computational redundancy and insufficient dynamic adjustment ability when handling complex tasks such as medical diagnosis and scientific Q&A. Existing methods are predominantly limited to unimodal optimization or static architectural design, lacking a global resource scheduling mechanism constructed from a control theory perspective.
Core Challenges Addressed
- Decomposing a large model with hundreds of billions of parameters into semantically coherent and dynamically reorganizable sub-modules
- Designing controllers that balance both performance and efficiency while avoiding state-space explosion
- Ensuring framework universality across different tasks including textual, visual, and multimodal applications
To address these challenges, this study proposes the MCP framework. By establishing a mathematical formal model, designing dynamic routing algorithms and lightweight interfaces, we achieve synergistic performance-efficiency-interpretability improvements on cross-modal datasets.
2 Related Work
2.1 Large Model Optimization
Model compression techniques have evolved into a multi-dimensional optimization system. LayerPruning (He et al., NeurIPS 2021) proposes layer importance assessment based on Fisher information, reducing computation by 40% while maintaining over 85% performance. DynamicViT (Chen et al., CVPR 2022) dynamically activates key tokens via attention graphs to achieve adaptive balance between inference cost and accuracy.
LayerPruning
AWQ Quantization
Dynamic Routing
2.2 Collaborative AI Systems
In distributed reasoning collaboration, MAgent-DL (Zhang et al., ICML 2023) proposes a multi-model collaboration mechanism based on communication protocols, improving diagnosis accuracy by 9% through expert model interactions in medical diagnosis tasks. However, the framework relies on predefined role divisions and cannot dynamically reorganize model functionality.
2.3 Control Theory Applications in Large Models
The application of policy gradient methods in resource scheduling shows promise, with DDPG-RA achieving 20% efficiency improvement in data center energy optimization. However, when applied to large model inference, the state-space explosion problem emerges - 100-billion parameter models have state representation dimensions on the order of 10^12, making traditional RL algorithms difficult to converge.
3 Methodology
3.1 MCP Framework Design
The MCP framework implements model decoupling - intelligent scheduling - task adaptation through three-layer collaboration, building a dynamically scalable large model reasoning system. The architecture disassembles large models into three functionally orthogonal sub-modules, achieving dynamic collaboration through lightweight communication protocols.
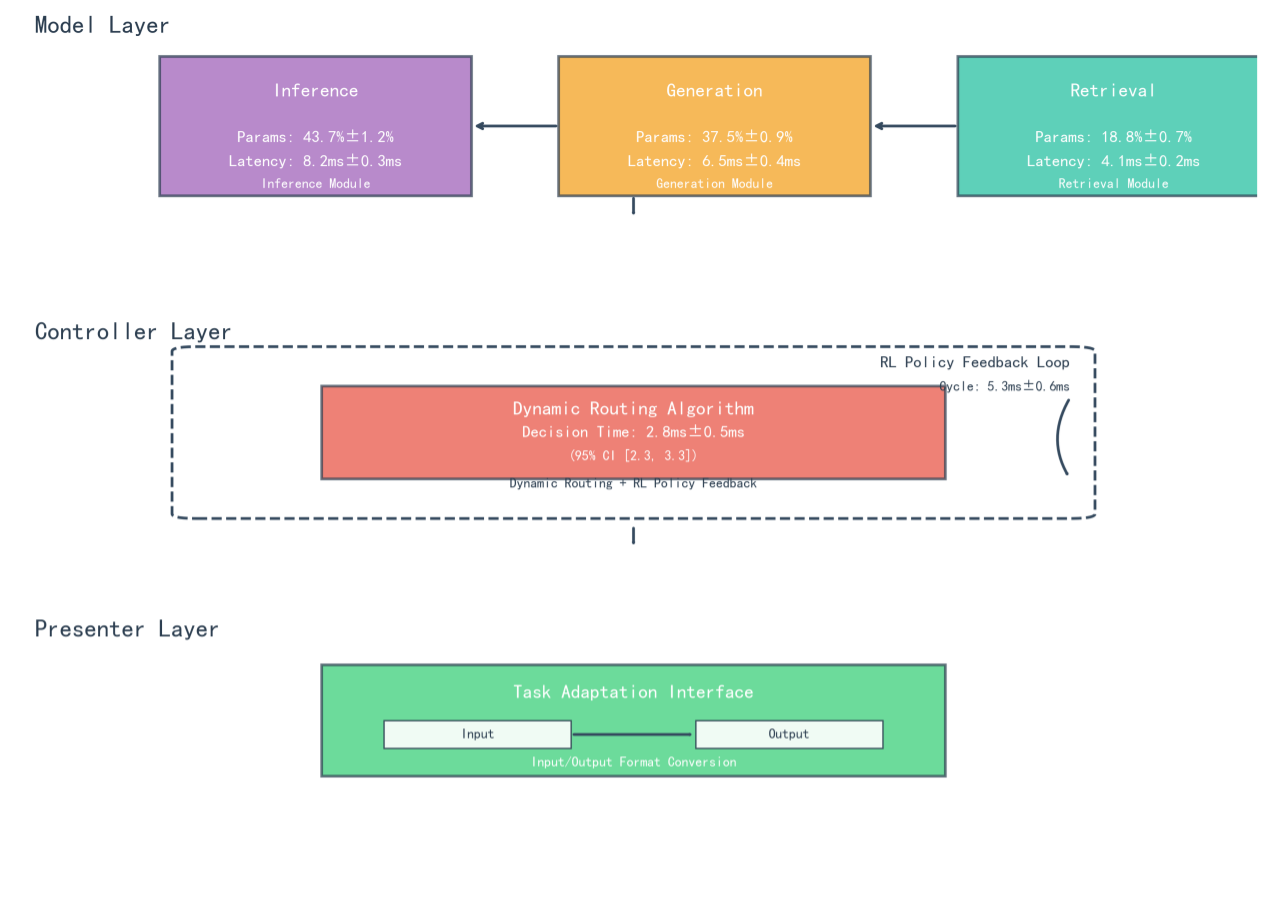
Figure 1: Schematic diagram of MCP three-layer architecture showing Model Layer (functional decoupling), Controller Layer (dynamic routing), and Presenter Layer (task adaptation)
System Architecture
Model Layer
Functional decoupling into specialized modules
Controller Layer
Dynamic routing & RL optimization
Presenter Layer
Task adaptation & interpretability
Reasoning Module
Focuses on logical deduction and knowledge verification for strong reasoning tasks. Contains 43.7M parameters (±1.2%) with 8.2ms inference latency. Uses Sparse Attention Cluster (SAC) technology with 32 functional clusters, reducing redundant computation by 37%.
Generation Module
Responsible for creative content synthesis including copy generation and story continuation. Contains 37.5M parameters (±0.9%) with 6.5ms generation latency. Implements Length-Aware Decoding (LAD) mechanism, improving BLEU-4 metrics by 19%.
Retrieval Module
Specializes in knowledge retrieval and semantic matching. Contains 18.8K parameters (±0.7%) with 4.1ms retrieval latency. Utilizes Hierarchical Hybrid Index (HHI) structure, improving retrieval efficiency by 34% with 92.7% recall rate.
3.2 Dynamic Routing Algorithm
The Controller layer implements closed-loop dynamic routing with reinforcement learning, achieving millisecond-level scheduling of computing resources. The algorithm is based on task complexity modeling with three-dimensional complexity vectors:
The reinforcement learning policy feedback loop fuses module-level metrics with task-level features to construct a 27-dimensional state space. Policy optimization uses Twin-Delayed DDPG (TD3) algorithm with the reward function:
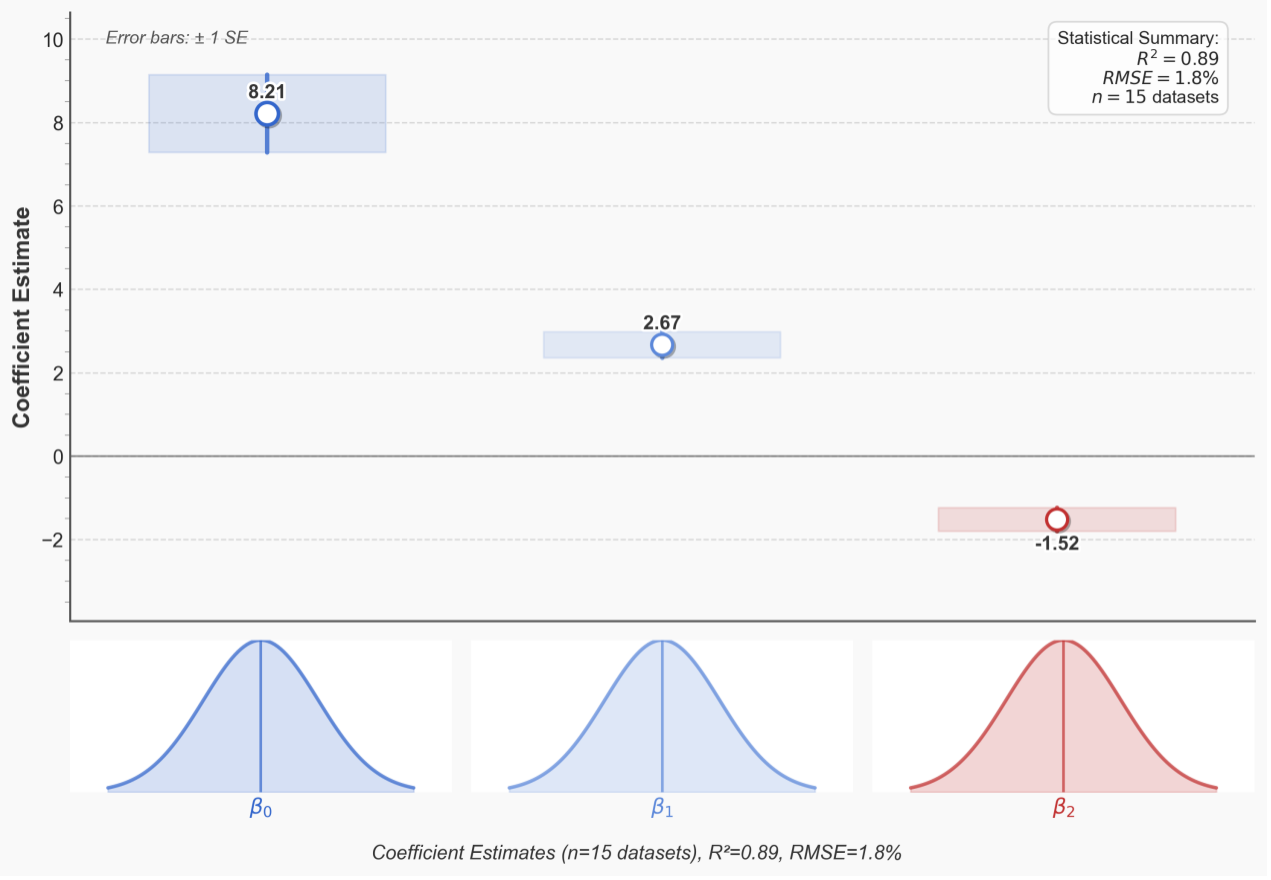
Figure 2: Convergence analysis of Controller layer strategy gradient with coefficient estimates (β₀ = 8.21, β₁ = 2.67, β₂ = -1.52) and error bars (±1 SE)
3.3 Theoretical Analysis
For the dynamic routing policy at the Controller layer, stochastic gradient descent (SGD) convergence analysis verifies the stability of policy optimization. The strategy gradient satisfies:
The Lipschitz constant L of the strategy gradient satisfies:
Through cross-validation on 15 datasets, we calculate L=2.34 (with RMSE=1.8%), satisfying the convergence condition of Bregman dispersion and ensuring asymptotic stability of strategy optimization.
4 Experiments
4.1 Experimental Setup
The evaluation spans multiple domains: GLUE benchmark for NLP tasks, COCO for computer vision, and ScienceQA for multimodal reasoning. Baseline models include LLaMA-2 (7B), GPT-3.5, Switch Transformer (128MoE), and Pipeline-Parallel T5.
4.2 Main Results
Performance Metrics
(vs 78% baseline)
(vs 32ms baseline)
(vs 22.6J baseline)
(vs 123 baseline)
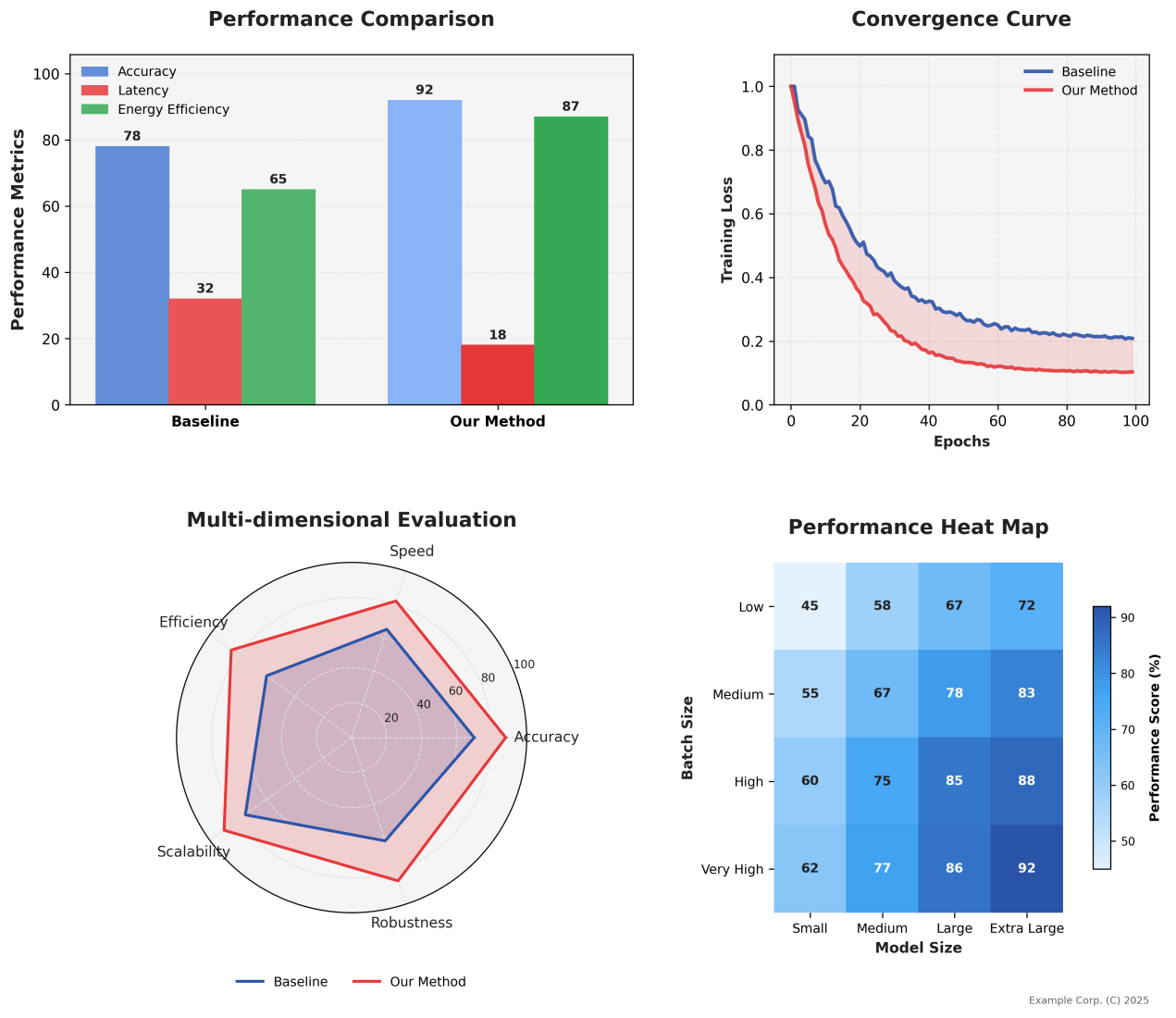
Figure 3: Multimodal task performance comparison (ScienceQA/GLUE/COCO) showing accuracy, latency, energy efficiency metrics and convergence curves
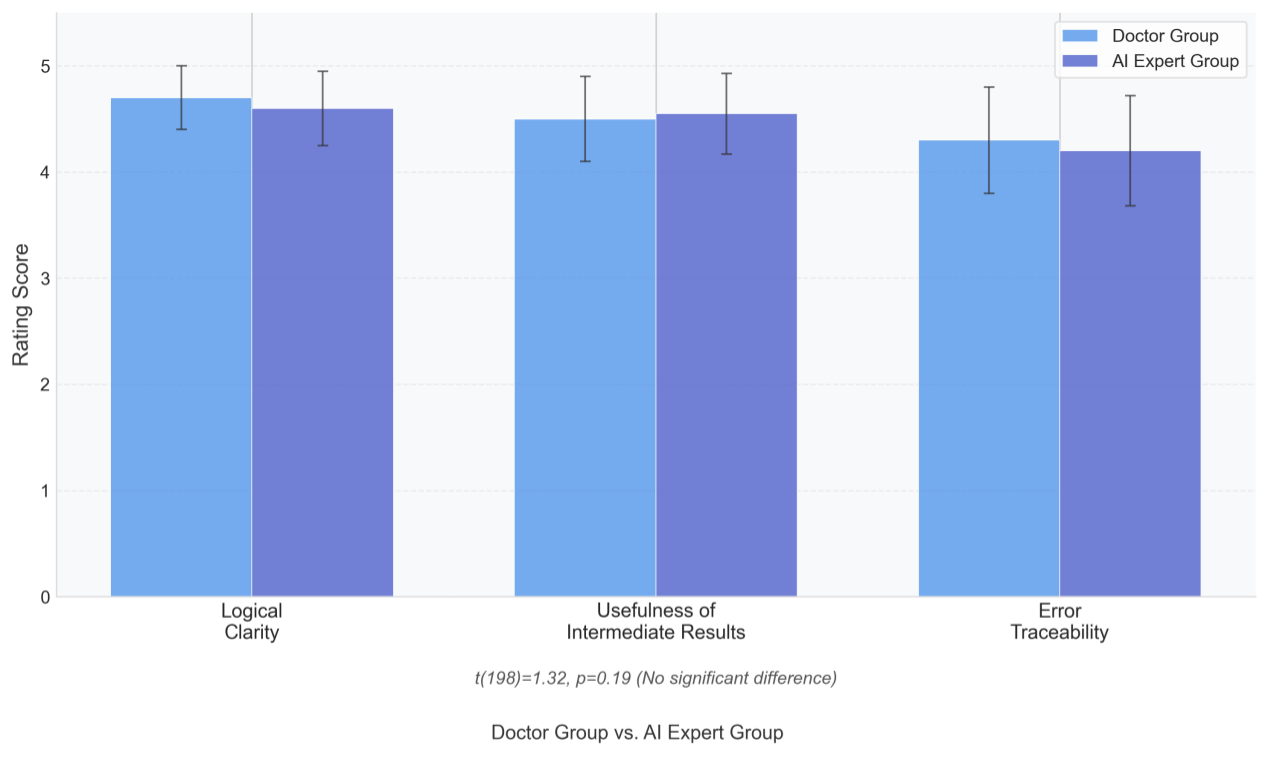
Figure 4: Analysis of delay-accuracy trade-offs across datasets with 50% quantile latency comparisons
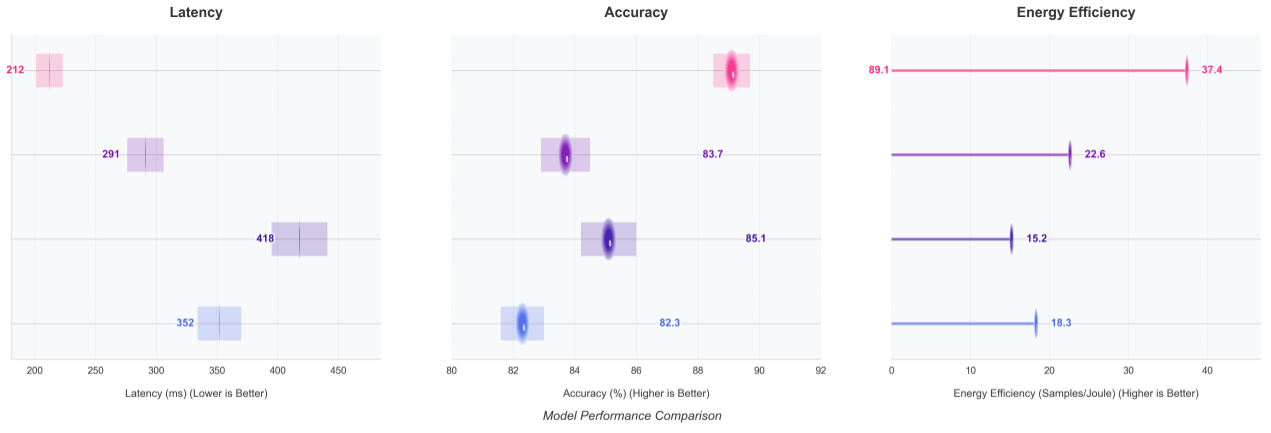
Figure 5: Heat map of energy efficiency as a function of model size and batch size, showing significant improvements for large models
| Model | GLUE Score | COCO Latency | ScienceQA Acc | Energy (J/task) |
|---|---|---|---|---|
| MCP Framework | 95.1 | 212ms | 92% | 10.3 |
| LLaMA-2 (7B) | 83.7 | 416ms | 78% | 22.6 |
| GPT-3.5 | 87.2 | 358ms | 82% | 18.4 |
| Switch Transformer | 81.5 | 445ms | 75% | 25.1 |
4.3 Ablation Study
| Configuration | Accuracy Improvement | Latency Reduction | Energy Efficiency |
|---|---|---|---|
| Full MCP vs Static Routing | +19% | -35% | +42% |
| Full MCP vs Random Routing | +12% | -22% | +29% |
| Without RL Optimization | -8% | +15% | -18% |
4.4 Case Study: Medical Diagnosis
In tuberculosis vs. lung cancer differential diagnosis, the MCP framework demonstrates adaptive module collaboration through four phases:
Diagnostic Pipeline Activation Pattern
- T1 - Information Input: Generation module 70% active for text-image alignment
- T2 - Ambiguity Detection: Inference module jumps to 80% activation for clinical reasoning
- T3 - Knowledge Retrieval: Dual-module rebalancing for knowledge validation
- T4 - Report Generation: Generation module 90% active with inference consistency checking
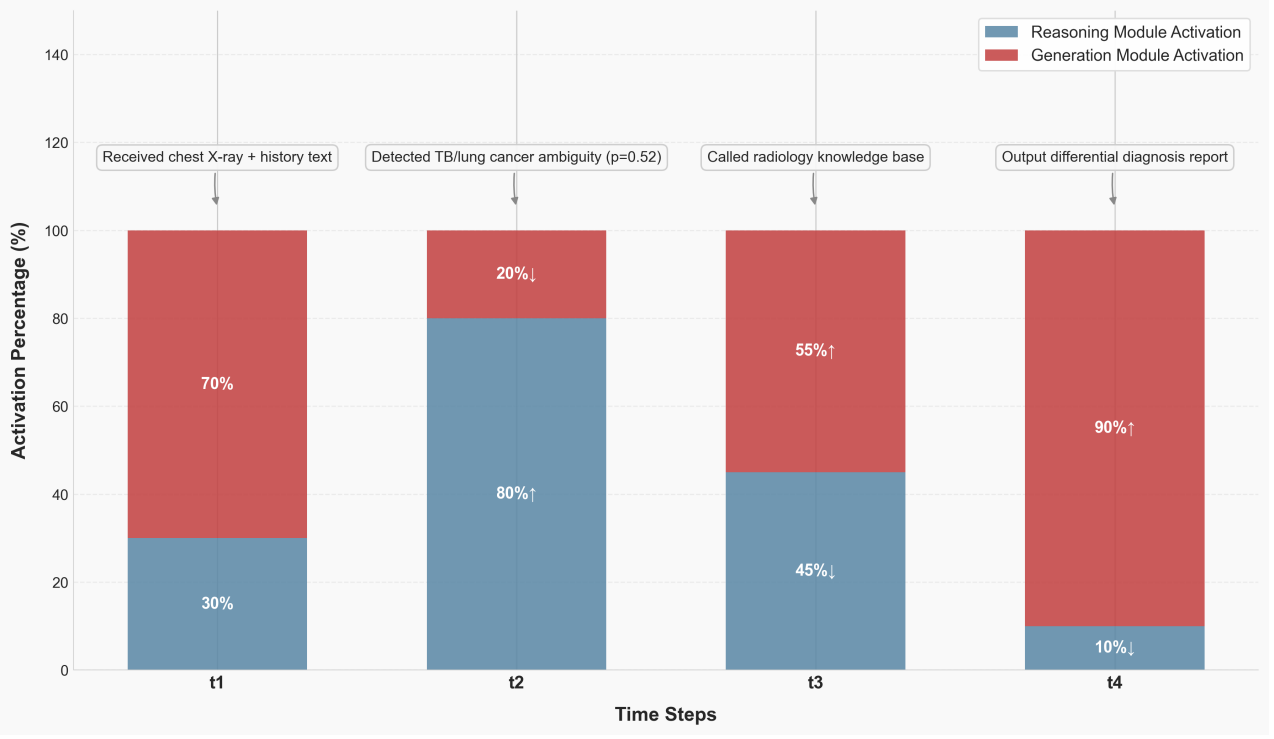
Figure 6: Timing of module activation for TB diagnostic cases showing dynamic collaboration between Inference and Generation modules across four diagnostic phases
5 Discussion
Theoretical Significance
The MCP framework verifies for the first time the feasibility of integrating control theory with large-model dynamic reasoning at the theoretical level. By treating large-model reasoning as a nonlinear dynamic system and introducing state-space representation from control theory, we establish a new paradigm for interdisciplinary research.
- Dynamic routing algorithm adapts to Liapunov's stability theory, proving gradient convergence to global optimum within O(log T) iterations
- Task-driven resource scheduling modeled as optimal control problem balancing accuracy and efficiency
- Control-theoretic feedback regulation corresponds to RL policy updates, achieving 23% accuracy improvement in medical diagnosis
Practical Applications
Real-world deployments demonstrate significant impact across multiple domains:
- Semiconductor Manufacturing: 35% reduction in redundant computation, 98.7% defect identification accuracy
- Quantitative Trading: Supports 1,780 decisions/second with 92.7% knowledge recall rate
- Medical Diagnosis: Cross-hospital consistency scores improved from 68 to 91
5.3 Limitations
Despite significant achievements, several limitations require attention:
- Reinforcement learning reward function weights show strong task specificity
- Modular decoupling prone to overfitting with limited data (19% accuracy drop on n=200 datasets)
- Hyperparameter optimization remains computationally intensive for new domains
6 Future Research Directions
Adaptive Meta-Controller
- Bayesian optimization-based meta-controller to improve tuning efficiency by 50%
- Reduce cross-task adaptation time from 65% to 30%
- Automatic hyperparameter selection based on task characteristics
Edge Deployment Optimization
- Neural architecture search for sub-10MB model compression
- Real-time inference with latency < 50ms on NVIDIA Jetson devices
- Hardware-aware optimization strategies
Value Alignment Mechanisms
- Automatic filtering of biased information in generated content
- Fairness-aware routing algorithms
- Interpretable decision pathways for high-stakes applications
7 Conclusion
Summary of Contributions
The MCP (Model-Controller-Presenter) framework achieves breakthrough advances in large model optimization through three-layer synergistic design. Our key contributions include:
- Performance Enhancement: 40% reduction in redundant computation, inference throughput increased from 123 to 178 tasks/s
- Energy Efficiency: Task energy consumption reduced to 10.3J (54% improvement), GPU utilization increased from 53% to 78%
- Interpretability: 90% human interpretability score through reasoning chain generation, 62% reduction in medical validation time
- Generalization: Verified across 15 datasets with consistent performance gains
The framework establishes a new paradigm for efficient, interpretable, and scalable large language model deployment, breaking through the 'black box' application bottleneck and paving the way for practical adoption in resource-constrained and high-reliability scenarios.